PBN概述
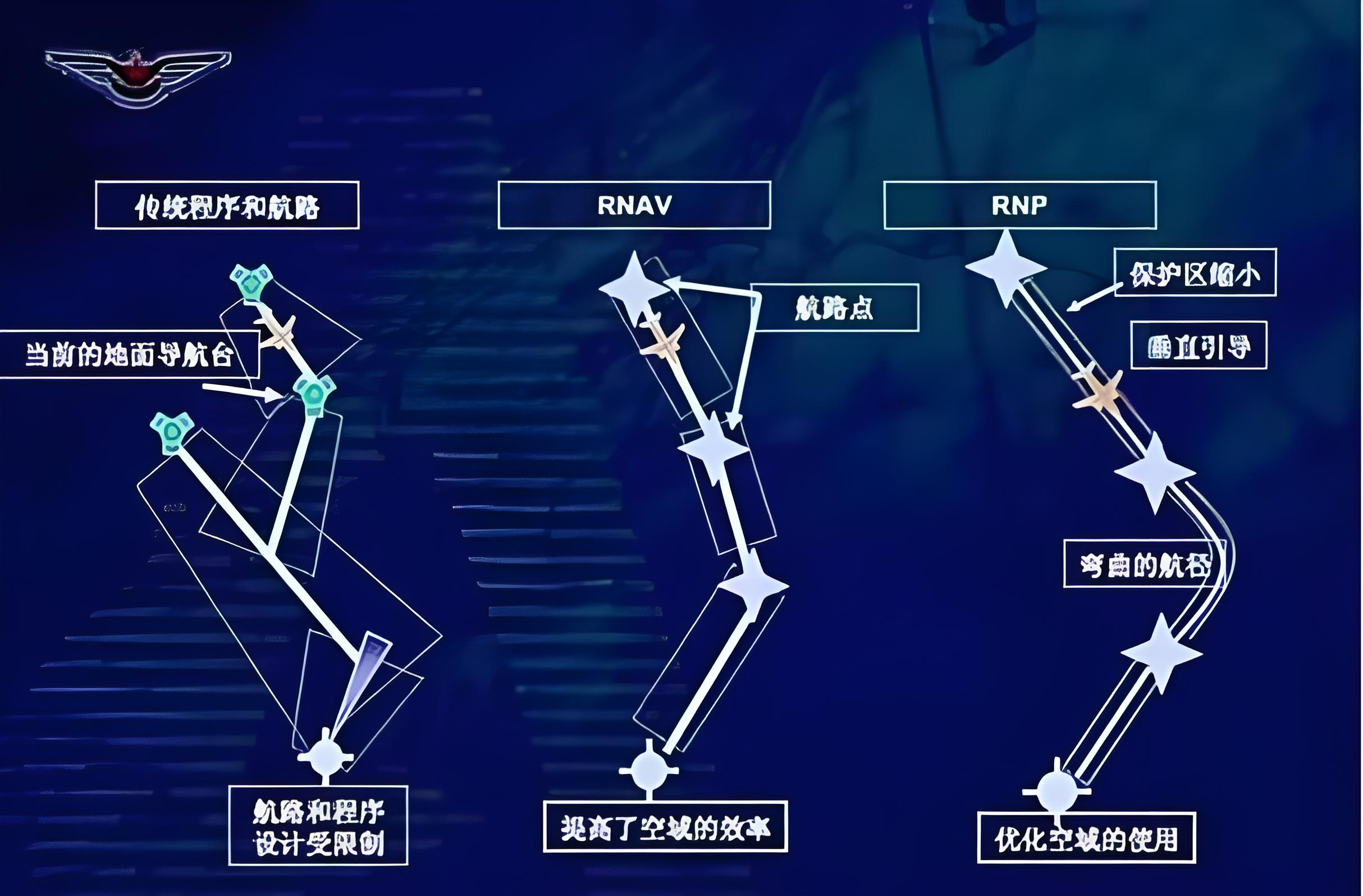
在航空飞行中,传统导航是利用接收地面导航台信号,通过向台和背台飞行实现对航空器的引导,航路划设和终端区飞行程序受地面导航台布局与设备种类的制约。随着航空器机载设备能力的提高以及卫星导航等先进技术的不断发展,国际民航组织(ICAO)提出了”基于性能的导航(Performance Based Navigaition,PBN)”概念。
PBN是指在相应的导航条件设施下,航空在指定空域内或者沿ATS航路、仪表程序飞行的系统性能,包括导航的精度、完整性、可用性和所需功能。目的是充分利用现代航空器机载设备和导航系统,提供全球一致的适航要求和运行批准标准。
PBN三要素:导航规范、导航设施和导航应用。
PBN的优势
1.精确地引导航空器,提高飞行运行安全性;
2.提供垂直引导,实施连续稳定的下降程序,减少可控飞行撞地(CFIT)的风险;
3.改善全天候运行水平,提高航班正常性,保障地形复杂机场运行的安全;
4.实现灵活和优化的飞行路径,增加飞机业载,减少飞行时间,节省燃油;
5.规避噪音敏感区,减少排放,提高环保水平;
6.实施平行航路,增加终端区内进、离场航线定位点,提高交通流量;
7.缩小航空器横向和纵向间隔,增大空域容量;
8.减少陆空话音通信和雷达引导需求,降低飞行员和管制员的工作负荷;
9.减少导航基础设施投资和运行成本,提高运行的整体经济效益;
相关定义
1.全球导航卫星系统(GNSS): GNSS是卫星导航的通用术语,在全球范围提供定位、测速和授时服务,由一个或多个卫星、机载接收机以及系统完好性监视等组成,包括GPS、Galileo、Glonass,中国的北斗及星基增强系统(SBAS)和地基增强系统(GBAS)等。
2.气压垂直导航(Baro-VNAV): 机载RNAV系统功能的一种,向驾驶员提供经计算的相对于特点垂直航径的垂直引导。该垂直引导是基于气压高度的信息,通过两个航路点的气压高度或者通过单个航路点为基准的垂直角度来计算确定垂直剖面。
3.远程导航系统: 被批准在仪表飞行规则下座位导航主要手段使用的一种电子导航组件,通过至少一种导航源定位,如惯性导航系统(INS)和/或全球导航卫星系统。
4.机载增强系统(ABAS): ABAS是一种使用机载信息对来自GNSS系统的信息进行增强和/或整合的系统。
5.接收机自主完好性监视功能(RAIM): 使用GPS信号或利用气压高度辅助GPS来确定导航信号的完好性。这种技术通过检验冗余伪距测量的一致性来实现的。预测时使用的遮蔽角不能低于5°,因为运行经验表明低高度上的卫星信号不可靠。
6.DME/DME/RNAV: 使用至少两个DME进行定位。
7.DME/DME/IRU: 使用至少两个DME进行定位,在DME信号覆盖的空隙区域,使用的惯性基准组件IRU能够提供足够定位信息的区域导航。
8.关键 DME: 如果某个DME不可用时,将导致DME/DME不能提供满足航路或程序要求的导航服务,则该DME被称作为关键DME。
9.飞行技术误差 FTE: 控制飞机的精度,根据飞机指示位置与期望位置之间的差异来确定。FTE不包括操作失误所导致引起的误差。
10.导航系统误差 NSE: 真实位置与估计位置之间的差值。
11.航径定义误差 PDE: 定义航径与要求航径之间的差别。
12.总系统误差: 实际位置相对于期望位置的偏差。TSE等于FTE、NSE、PDE的矢量和。
13.固定半径转弯RF: 开始于并终止于定位点,有确定转弯圆心和半径的圆弧航径,可作为程序的一部分儿公布。
14.PBN完好性: 由航空器导航设备故障导致总系统误差大于PBN值的2倍,被认为是主要失效情况。
15.PBN连续性: 如果能使用GNSS以外的其他导航系统,并能安全地飞往适当机场降落,则失去功能被认定为次要失效情况。
16.PBN可用性: 通过特定的RAIM预测途径,对PBN在某些时段的可用性进行预测,并对不可用时段进行要求。
17.PBN准确性: RNAV X: X表示航空器在95%的飞行时间内,总系统误差不超过X海里。RNP X: X是在仪表飞行运行时95%概率的水平导航精度值。
精度是指对于某一具体地点,至少在95%的飞行时间里,估算位置于实际位置之间的差异在误差范围内。获得高精度要求适航审批的航空器,并非就自动获得低精度要求的导航规范适航审批。例如:获得RNAV5运行资格的飞机及机组不等于RNAV10的运行资格,同样获得RNP APCH运行资格的飞机机组不等于有RNAV1的运行资格。
PBN导航规范
PBN包含两类基本导航规范:区域导航(RNAV)和所需导航性能(RNP)。
导航规范: 为满足在指定空域内PBN的运行而对航空器和机组成员的一系列要求。
RNAV区域导航: 区域导航(RNAV), 区域导航是一种导航方式,它可以使航空器在地基导航系统信号覆盖范围内,或在机载自主导航设备的工作能力范围之内,或二者的组合沿任一期望的航径飞行。RNAV系统可以是飞行管理系统的一部分。
RNP所需导航性能: 具有机载性能监视和告警能力(OPMA)的RNAV
区域导航 RNAV
区域导航(RNAV): 利用区域导航功能可以使用航空器在导航信号覆盖范围内,或在机载导航设备的工作能力范围内,或者二者的组合,沿任意期望的路径飞行,RNAV要求在95%的飞行时间内必须满足规定的精度。
按照对总系统误差的不同要求,RNAV运行分为RNAV1、RNAV2、RNAV5和RNAV10,除特殊情况外RNAV10使用于海洋和偏远地区的航路飞行,RNAV5一般用于陆地航路飞行,RNAV2一般用于航路运行,RNAV1用于所有RNAV DP和STAR的运行。
实施区域导航运行必须获得局方的运行批准。(B0011和B0015)
公司在实施RNAV运行前,公司和公司欲使用的各型飞机、各相关涉及手册应获得民航当局的批准。
飞行计划(FPL)第10项中填写R,表明机载设备具有PBN能力并已获得批准; 在编组18中PBN/代码之后填入能够满足基于性能的导航水平。
RNAV1 进场程序(STAR)可以引导飞机到中间进近定位点,不得用于中间进近(追踪航迹进近)和最后进近(追踪下滑道进近),之后完成最后进近和着陆,复飞仍为传统程序。
RNAV 失效应急程序: 飞行机组应及时向相关空管部门报告有关RNAV系统部件失效和失去所需的导航能力的任何问题,以及建议的行动。并听从控制交通管制员指挥。如果条件允许还应通知签派员。签派员应了解详细情况,协助飞行机组处置并做好相关记录。当出现通信失效时,飞行机组应按照公布的通信失效程序继续执行RNAV程序。
所需性能导航 RNP
RNP精度: RNP值是在仪表飞行运行时95%概率的水平导航精度值(以海里表示)。RNP 1适用于进离场、起始进近、中间进近和复飞航段,RNP0.3适用于最后进近航段。
如果只使用单独的GPS实施RNAV程序运行,应证实具备RAIM功能,并能得到卫星不可用具体情况的最新通告。
如果预测到计划飞行的任何阶段(包括巡航)失去RAIM持续超过5分钟,则此飞行应推迟或取消,或者在满足RAIM要求的区域重新拟定飞行计划。
只能通过进离场航线或进近程序的名称将其从导航数据库中调出,在确认与航图一致后,方可使用。对于进离场航线,飞行机组可以根据随后ATC的许可,通过增加或删除个别航路点对程序进行修正。不允许通过人工输入经纬度来生成新的航路点,不能改变航路点的”旁切”或”飞越”属性。
各类导航数据桂发使用场景
| 空域 | 推荐的导航规范 | 可接受的导航规范 |
|---|---|---|
| 航路-海洋 | RNP 2、RNP 4 | RNAV 10 |
| 航路-偏远陆地 | RNP 2 | RNAV2、RNP4、RNAV10 |
| 航路-陆地 | RNP 2 | RNAV 2、RNAV 5 |
| 终端区-进离场 | RNAV 1、RNP 1 | |
| 进近 | RNP APCH、RNP AR |
不同PBN规范下设备标准
| 导航规范 | 主用导航源 | 地面导航设施 |
|---|---|---|
| RNAV 10 (RNP 10) |
GNSS,INS/IRS | 不可用 |
| RNAV 5 | GNSS,DME/DME, VOR/DME,INS/IRS |
VOR,DME |
| RNAV 1/2 | GNSS,DME/DME,INS/IRS | DME |
| RNP 4 | GNSS | 不可用 |
| 基本RNP1 | GNSS | DME |
| RNP APCH | GNSS | VOR、DME、NDB(用于复飞) |
| RNP AR APCH | GNSS | 不可用 |
Tips
1.RNAV10(RNP10)与RNP4,这两者应用场景有些相似(洋区和偏远陆地),都不依赖地面导航设施,但除了精度有差别外,RNAV10(RNP10)主用导航源是GNSS+INS/IRS, INS/IRS惯导系统时间越久,累积误差越大,所以运行RNAV10(RNP10)会有时间限制。某公司的运行规范中,两套INS/IRS,限定飞行时间为6.2小时。RNP4主用导航源为GNSS+OPMA,就不存在在这个问题。
2.在航图中能够看到RNAV DME/DME或者RNAV DME/DME/IRU:实际上这就是指使用两个DME定位或者至少两个DME,在DME信号覆盖的空隙区域,使用的惯性基准组件IRU能够提供足够定位信息的RNAV,如RNAV1和RNAV2,这两类导航规范的主用导航源选择范围较广,既可以是DME/DME,也可以是DME/DME/IRU,还可以是GNSS,对外发布时需要公布关键DME(如果有的话)。
3.RNAV 5是唯一一个主用导航源可以使用VOR的PBN导航规范,它的主用导航源可以是VOR/DME,DME/DME或者GNSS+INS/IRS。
4.RNP导航规范主用导航源就是GNSS,例如基本RNP1和RNAV1相比,主用导航源就是GNSS+OPMA,不像RNAV 1可以不同选择。在实际运行中,我们需要着重区分RNP APCH(公布为RNP GNSS)和RNP AR APCH(公布为RNAV RNP)这两者。对于同一机场,所有的机型都能运行同一个RNP APCH,但每个机型都有不一样的RNP AR APCH,需要特殊授权。
此外,RNP AR APCH能够提供固定转弯飞行模式(即有RF航段),最后进近航段可以进行弯曲进近,航迹选择更为灵活。RNP APCH可以选用VNAV,而RNP AR APCH必须使用VNAV。在实际飞行过程中,GNSS具有最高优先级,如无法使用GNSS,FMC一次选择DME/DME、VOR/DME、IRS。并且在执行RNP AR进近时,还会抑制地面导航台的信号,即惯性导航系统IRS失去GPS位置更新时,不会依靠单台VOR/DME进行IRS位置的无线电更新。
PBN的进近类型
1.使用RNP进近,但只提供水平方向的引导,使用LNAV标准时,是非精密进近,由于没有使用垂直引导,LNAV的进近最低标准高于其它类型的RNAV。LNAV使用400英尺的决断高度,保护区比VOR小。这种方式通常是通过GNSS+ABAS+DME/DME(或VOR/DME)实现。
2.使用RNP进近,提供水平和垂直方向引导,使用LNAV/VNAV标准时,是类精密进近。LNAV/VNAV标准降低了垂直障碍清除(Vertical Obstructuion Clearance)要求,这种方式通过GNSS+ABAS+Baro-VNAV实现。
3.使用LPV标准时,也是类精密进近,LPV具有水平和垂直方向引导,精度比LNAV/VNAV高,但是又比ILS低,使用250英尺决断高度,34英里能见度(有适当的灯光时12英里),40m HAL(水平告警门限)和50m VAL(垂直告警门限),这种进近方式国外应用的比较普遍,国内暂无。这种方式通过GNSS+SBAS实现。
4.RNP进近只有一种是精密进近,即采用地基增强系统的GNSS+GBAS。
RNP AR 运行
特殊授权的RNP运行(以下简称为RNP AR运行) 是指用于要求授权的特定公司特定机场的特殊航空器和机组(SAAAR)实施所需导航。(Special Aircraft and Aircrew Authoriazation Required)
根据民航局要求,公司每一个RNP AR程序,均需得到局方的批准。公司可以实施RNP AR程序的机场和飞机,详见公司《运行规范》C0060、D0003。性能(RNP)仪表程序的运行。
RNP AR程序标识为RNAV(RNP).
RNP AR是要求RNP≤0.3NM的进近和要求RNP≤1.0NM的复飞。
RNP AR仪表进近要求的导航精度值小于或等于0.3海里(RNP≤0.3NM,最小的RNP值0.1NM) RWYxx。
RNP AR程序一般要求全球导航卫星系统GNSS/GPS进行更新。
温度限制: 由于温度限制仅是针对最后进近航段的超障评估,并且温度补偿仅影响垂直导航,因此要求飞行机组人员注意温度条件变化对起始和中间进近航段最低高度以及决断高度/高(DA/H)的影响;(注:当温度高于标准值(ISA)时,航空器高于指示高度,当温度低于标准值(ISA)时,航空器低于指示高度)。RNP AR仅有低温限制。
RNP 预测格式
RAIM PREDICTION
AIRPORT: ZULS
MASKANGLE(degree): 5.000000
RNP0.30: available from 1811070000Z to 1811100000Z except for 1811070250Z to 1811070252Z
RNP AR放行评估
1.公司RNP AR程序
公司所指RNP AR程序是指飞机使用的经局方批复的RNP AR程序,执行的精度为RNP0.3,具体批准的飞机号见《运行规范》D0003。
2.检查机组资格
签派放行执行RNP AR程序的航班时,要确认执行RNP AR程序的机组(机长和副驾驶)获得了RNP AR的相关培训,并获得相关运行的资格;针对双机长运行的高高原航线实施RNP AR程序时,实施起降的机长都必须具备相应的RNP AR资质。
3.飞机能力评估
按照《运行规范》D0003条目检查签派放行的飞机是否具备RNP AR运行能力;查阅所签派飞机的相关的MEL条目,根据MEL限制评估故障条目对RNP能力的影响程度;向机务部门确认所放行飞机具备RNP能力。
具体的飞机设备要求:
1) 所有RNP AR程序都要求有可工作的A级地形提示和增强型地形警告系统(EGPWS)
2) 自动驾驶仪和飞行指引仪
3) 飞行管理系统FMGC (任一部都不能失效且两部位置应一致无误差)
4.天气标准评估
根据RNP程序图公布的起飞、着陆标准(包括云高、能见度、程序公布温度限制等),评估机场实况、预报或者两者结合,在飞机离场或者飞抵目的地时是否符合落地标准,检查执行RNP AR程序机场的QNH值可用。
5.RNP能力预测(RAIM)
签派放行飞机前,登录中国民航科学技术研究院(简称航科院)网站获取相应的RAIM预测,系统已实现自动获取的功能。
6.导航数据库
与情报确认RNP AR导航数据库可用,同时要求客户的RNP AR航图配备。
7.航行通告检查
导航数据差异、障碍物变化、航图变化等信息均对RNP AR程序有影响。
签派RNP AR程序航班以前,应查询是否收到相关通告,检查相关通告对RNP AR程序的影响。
8.载重性能和限制
签派放行使用RNP AR程序航班前,需要考虑影响程序执行的起飞重量,通过对最低、最高温度及风向风速的评估,确定实际起飞重量,以满足RNP AR运行的需求。
9.空管申报要求
不晚于放行RNP AR程序航班前2小时30分钟向管制部门排放FPL领航计划报。
SBAS、GBAS与BAS
星基增强系统 SBAS
SBAS(Satellite-Based Augmentation System)主要是利用差分卫星导航技术。即基准站(位置已知)接收GPS信号后,解算得到自身位置,将解算值与已知值进行比较,求出卫星定位误差,然后通过地球静止卫星(GEO)向用户播发修正信息,实现度抑郁原有卫星导航系统定位精度的改进。
现在全球已经有多个SBAS系统,如美国的广域增强系统WAAS(Wide Area Augmentation System)、欧洲的同步卫星导航覆盖服务EGNOS(European Geostationary Navigaition Overlay Service)、日本的多功能卫星增强系统MSAS(Multi-Functional Satellite Augmentation System)、印度的GPS辅助型近地增强导航GAGAN(GPS AidedGeo Augmented Navigaition)以及俄罗斯的差分校正和监测系统SDCM(System for Differential Corections and Monitoring)等。我国民航PBN应用目前是不包括SBAS的。
地基增强系统 GBAS
GBAS(Ground Based Augmentation System)与SBAS原理相似,但却是通过甚高频数据广播(VDB)向终端区航空器播发修正信息,覆盖范围较小,大概在23NM的距离内,但精度很高,能够支持I类和II、III类精密进近,并实现在其工作范围内从进近、着陆、离场到场面运行的全覆盖。GBAS设备一般安装在机场附近。
机载增强系统 ABAS
ABAS(Airborne Based Augmentation System)利用GPS信息和其他传感器(如IRU等),通过一系列算法,实现机载导航系统的完好性监控。典型的ABAS主要包括接收机自主完好性监视RAIM(Receiver Autonomous Integrity Monitoring)。
RAIM是一种算法。正常卫星定位需要4颗卫星,当出现第5颗卫星时,即可以通过这种算法,算出同一个地点的多个位置解,然后进行比较,结果理应相同。如果不同,即说明其中一个结果有问题,导航信息可能不可靠,系统将出现告警,这即所谓的FD(Fault Detection)功能。当有6颗卫星时,就能推算哪个解是错误的,然后排除,实现FDE(Fault Detection and Exclusion)功能。RAIM预测是推算飞机运行区域是否至少有5颗卫星。AAIM是利用惯性导航IRS、气压高度表或无线高度表等组合进行完好性监测和性能改善。
实际上,RAIM和AAIM就是OPMA机载监视与告警(On-board Performance Monitoring and Alerting)。
RNAV和RNP的区别
1.RNP包括了对机载性能监视和告警(OPMA)的要求并向飞行员显示是否达到了预定精度要求,而RNAV则不要求(通过RAIM或AAIM实现),RNP运行必须要有RAIM预测可用。
2.管制责任不同:对于RNAV,管制员对航空器的偏航负责(缺少机载性能监视和告警能力),对于RNP,飞行机组对其负责。
3.RNAV的主要导航源是GNSS和DME/DME,最小运行精度是RNP-1,而RNP的主要导航源是GNSS,最小运行精度的RNP-0.3。简单理解就是:RNP比RNAV精度要高。
4.RNAV导航源为GNSS和DME/DME,RNP导航源只有GNSS。
RNP AR和RNP APCH程序的区别
(1)机组资质:RNP APCH:机长必须具备RNP APCH资质,副驾驶只要有一个具有RNP APCH资质就可以了。 RNP AR: 机长有资质,全部飞行机组经过训练。
(2)批准方式不同:RNP APCH是对外开放,所有航空公司只要满足要求就可以使用;RNP AR针对特定的公司、特定的机场、有特定资格的飞行员和飞机来制定的。
(3)精度要求:RNP APCH要在RNP进离场、进近程序的起始、中间和复飞阶段至少95%的总飞行时间内,横向TSE和沿航迹误差不大于1海里;在最后进近阶段,至少95%的总飞行时间内,横向TSE和沿航迹误差不大于0.3海里。
(4)RF航段:RNP AR的起始进近航段和最后进近进近航段都可以使用RF段类型。RNP AR最后进近阶段使用Baro-VNAN,在APCH不是必需的。
(5)航图标记:RNP APCH为RNAV(GNSS)或RNAV(GPS);RNP AR为RNAV (RNP),同时航图标记为某某航空公司某某飞机的SAAAR,说明栏有SAAAR或者AR项。
若飞行准备期间发现RAIM预测在飞行阶段不可用的处理方式
因为卫星的相对位置是持续变化的,因此要在飞行前检查预达时间的RAIM可用性。如果预测RAIM不可用,则必须使用其他导航系统.各公司手册上应明确写到:如果只使用单独的GPS实施RNAV程序运行,则必须使用当前的GPS卫星信息来确定拟定航路和终端区飞行的GPS RAIM可用性,并能得到卫星不可用具体情况的最新通告。公司应使用ATC提供的RAIM预测信息,也可以使用特定模式的RAIM预测软件或接收机的RAIM预测功能来满足此要求。
如果预测到计划飞行的任何阶段失去RAIM持续超过5分钟,则此飞行应推迟或取消,或者在满足RAIM要求的区域重新拟定飞行计划。飞行机组应评估在GPS导航失效的情况下的导航能力(比如进行备降)。放行时策略:
(1)调整起飞或着陆时间,确保在相应飞行区域内预测值满足RNP程序要求。
(2)增加额外等待燃油,避开RNP不用时段。
(3)取消该次航班的RNP放心,改用其他进近方式。例如飞拉萨若无RAIM预测值,可咨询管制是否可以使用传统程序。
运行RNP AR/APCH 如何获得审批
临时批准:对于每种机型前90天和至少100次的AR进近,公司将获得RNP0.3相关的最低标准的批准。对于无RNP 0.3相关的最低标准的进近程序,必须在目视气象条件下(VMC)飞行。
最终批准:营运人圆满完成初始90天或者至少100次RNP AR进近试运行后,局方将颁发运行规范或授权值,批准使用适用的最小RNP值。
PBN运行与FPL报文
a)如果在编组10A中使用了“R”,则在第18编组PBN/需要填写内容;相反,如果在PBN/填写了内容,则在第10A项中,需填写“R”
b)如果填写了B1,B2,C1,C2,D1,D2,O1,或者O2,那么对应的在编组项10A中必须包含”G”
c)如果填写了B1,B3,C1,C3,D1,D3,O1或者O3,那么对应的在编组项10A中必须包含”D”
d)如果填写了B1或者B4,那么对应的在编组项10A中必须包含“0”或“S”,并且同时要包含”D”
e)如果填写了B1,B5,或C1,那么对应的在编组项10A中必须包含“I”
f)如果填写了C1,C4,D1,D4,O1,O4,那么对应的在编组项10A中必须包含“D”和“I”
本文采用 署名-非商业性使用-相同方式共享 4.0 国际 许可协议,转载请注明出处。




